The DENTIST BUILD REPORT - Stories from the undergraduate home front
Part 1: Getting organized
Landon:
As with the go kart, this project began with an innocuous Facebook message from Rebecca:
Again, like the fool that I am, I agreed. Little did I know… //Rebecca: I blame you, Charles.
The Dentist is a 250 lb combat robot designed and built for ABC’s Battlebots Season 2, a collaboration between myself, Rebecca, and Bayley as the core crew, with Austin, Kramnik, and Mike rounding out the rest of the team, along with some supporting characters that were roped in to help with particular aspects of the design or construction. This whole ordeal began with Charles Guan, team JACD, and Overhaul competing in Season 1 - we are all good friends with that team, and had been throwing ideas around for an entry of our own for Season 2. Throughout this process, a few key points came to light:
- This team was interested in trying something new and pushing the envelope.
- We were all really interested in extremely high energy storage bots - definitely above the ~100 kJ of the current high-KE spinners (e.g. Tombstone).
- We weren’t terribly interested in winning or building a competitive bot - along with the high kinetic energy comes the understanding that your own bot has to withstand itself - a tall order.
- We were interested in alternative and unconventional power systems - extremely large motors, ramjets, etc.
With these factors in mind, along with the rule that all bots had to have an actuated weapon that didn’t depend on the drive system (so high-KE melty’s were sadly out of the question), we settled on a vertical drum spinner, taking some influences from Touro Maximus and Hypershock. We aimed to differ in a few key ways though:
- Higher stored energy via higher rpm’s
- Better maneuverability through a counter-rotating drum or flywheel
- “Injectable” teeth to allow for spin-up even while being harassed by another robot, to allow high speeds to be reached before contact.
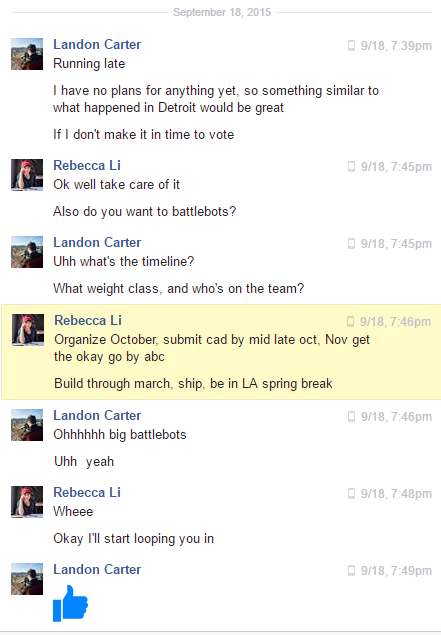
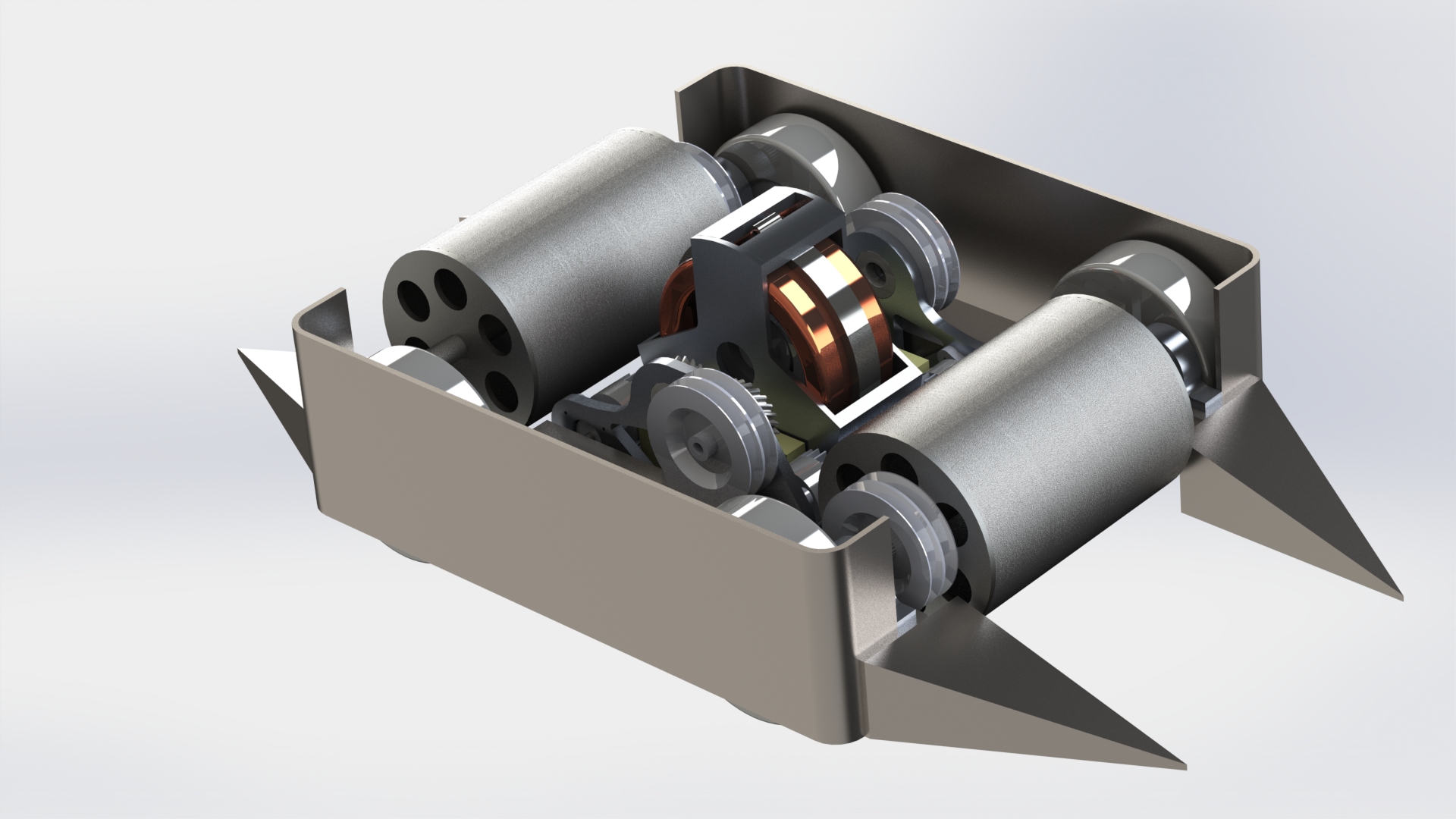
With that in mind, and with some prompting from Charles to start early, we threw together a design based around the motor out of a Toyota Prius - a ~50 kW brushless motor weighing about 30 lbs and with enough thermal mass to withstand 100kW for a few hundred milliseconds. We decided on a dual-drum design to balance out the moments of inertia and counteract gyroscopic precession, the same theory behind counter revolution’s design, just with more energy.
Here’s our first sketch of that design, which we sent to Greg Munson, one of the producers, to get some of his preliminary thoughts:
And here were his thoughts…
“My quick feedback on this robot is the shape is too boring. Too many robots are rectangles with 4 wheels.
Yes, that is an efficient design for a chassis, but its a design we see over and over and over and over… This robot needs more personality”
-email from Greg.
Welp. Time to revisit. Greg Called us “boring”.
Continued in part 2.
Part 2: Rev 1
Rebecca:
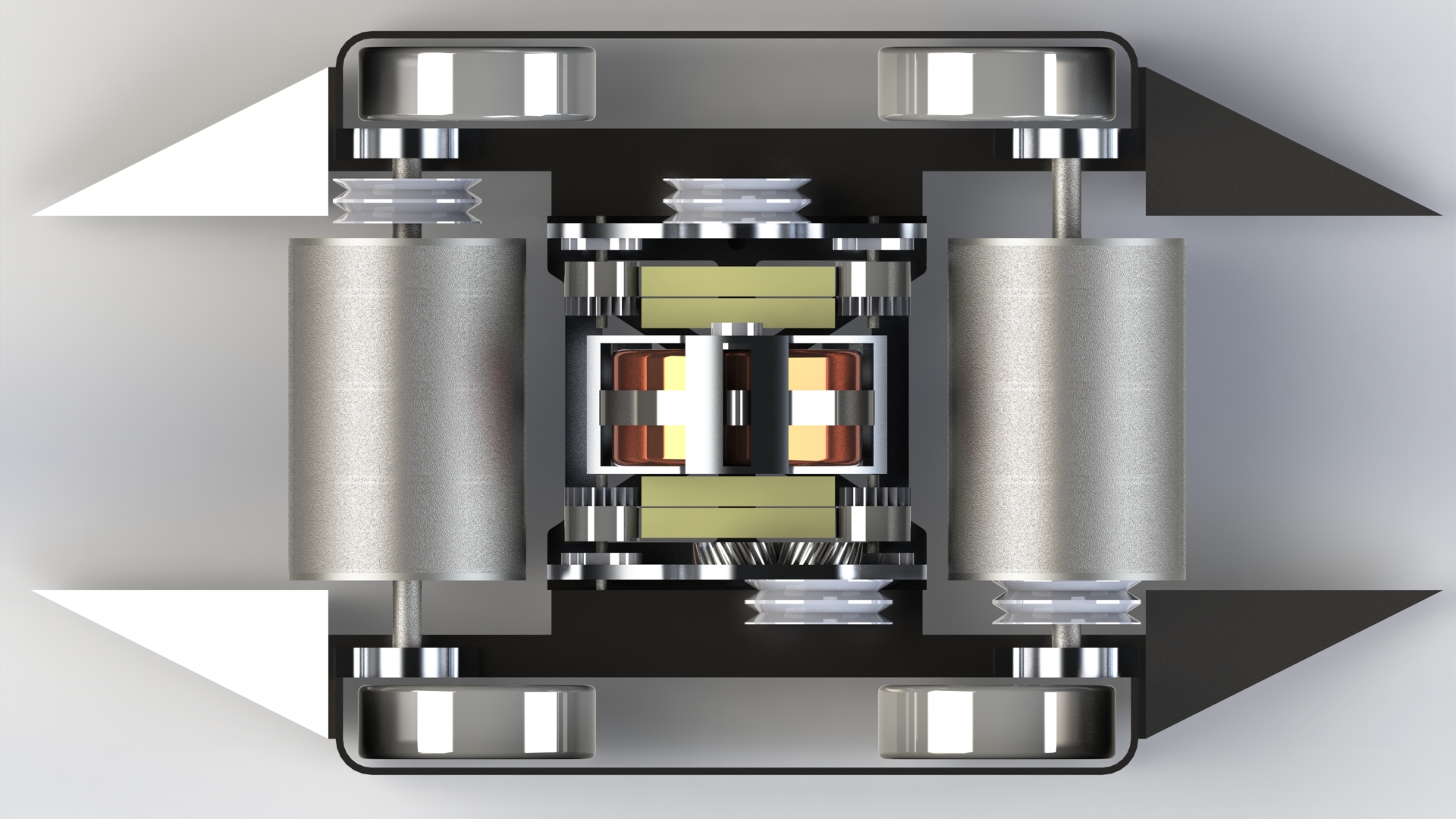
From the technical perspective, Revision 1 scrapped the dual-drum design and moved to a flywheel design. The injectable tooth design was not figured out yet, so it’s absent from this design.
But the technicals really came second in this revision. When we started changing our design around, we scrapped any semblance of reality and went with concept art that Sarah drew. We wanted to be aggressive, helmet based, and definitely not a square. This “concept based design” would appeal to ABC and at least get us into the competition.
The result was a decorative helmet and sweeping side wings with wedgelets in the front. The helmet covered the top of the robot, protecting the flywheel while giving us non-square shape. It also functioned as a self-righting mechanism by dramatically sweeping open to put us upright. The maneuver would have been called…
Landon: TIPS FEDORA.

Rebecca:
We also added sweeping wings to the side (for intimidation factor) and added a gentle taper toward the front of the robot. All of the CAD was done by Bayley and was purely aesthetic, but come January 2016 we were accepted into Battlebots Season 2!
Acceptance freakout ensues, basically feels like we got into MIT all over again.
Check back for the release of Part 3 of the build report next week!
Update: Part 3 of the build report is now up!